
1 曲柄连杆机构的计算
曲柄连杆机构将旋转运动转换为往复运动-反之亦然。
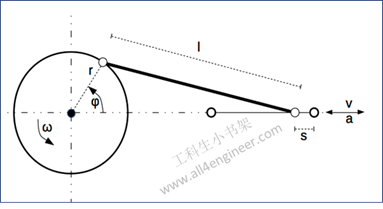
图 1
杆端头的位置可以表示为:
s = r (1 – cos φ) + (λ / 2) r sin2φ
式 1
其中: s = 连杆位置 (m)
r = 曲柄半径 (m)
φ = ω t
= 2 π ns t
式 2
其中:ω = 曲柄角速度 (rad/s)
t = 时间 (s)
ns = 曲柄转速 (转/s)
λ = r / l
式 3
其中:l =杆长(m)
λ = 连杆比
连杆端头速度:
v = ω r sin φ (1 + λ cos φ)
式 4
其中:v = 连杆沿导轨的速度 (m/s)
连杆端头加速度:
a = ω2 r (cos φ + λ cos 2φ)
式 5
其中:a = 连杆加速度 (m/s2)
